啓学館ゼミナールで隔週水曜日に行っている「ロボットプログラミング教室」
教材もレベル3に入り、なかなか複雑になってきました。
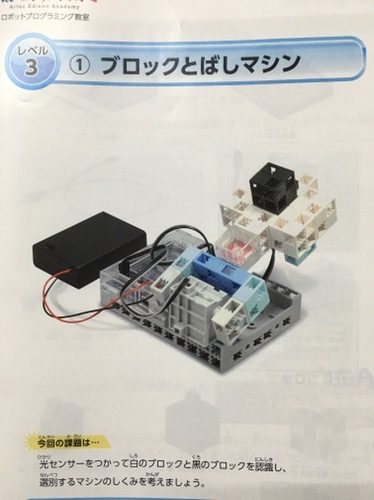
今回は「ブロックとばしマシン」を作成しました。
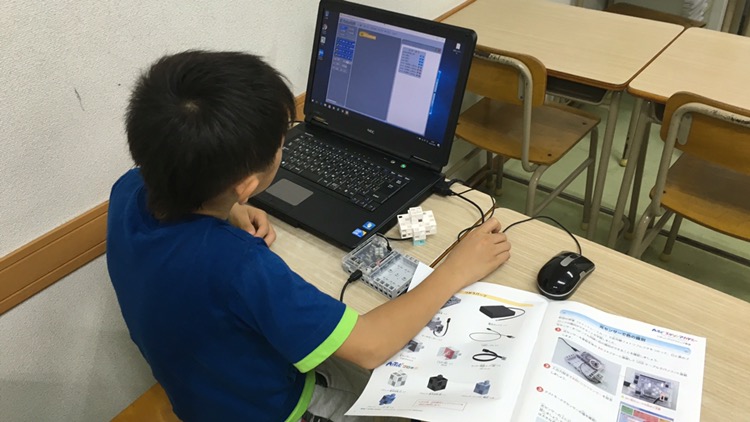
プログラミングをしているところです
光センサーの値で白のブロックと黒のブロックを識別します。
どのくらいの数値にするのかは、その時の光の加減で変わりますので毎回測定が必要です。
今は、Scratchで行うプログラミングの画面をテストモードにして、センサーの数値を調べているところです。
結構微妙な数値なので難しいですね。
完成しました
組みたてやプログラミングはそれほど複雑ではなかったので、結構スムーズに出来ました。
やはり、一番苦労したのは光センサーの値です。
では見てください。
白と黒を識別して、黒がセンサーの上に乗るとブロックを飛ばします。
しかし、手の影などでも反応してしまうため乗せ方も難しいです。
また、一瞬で判断してブロックを飛ばすので、もう少し飛ばすまでのタイムラグが欲しいところです。
次回はそのあたりを修正したプログラミングをしていく予定です。

コメント