本日は啓学館ゼミナールの夏期講習最終日。
最終日にロボットプログラミング教室を実施しました。
今回は自動車の制御の2回目です。
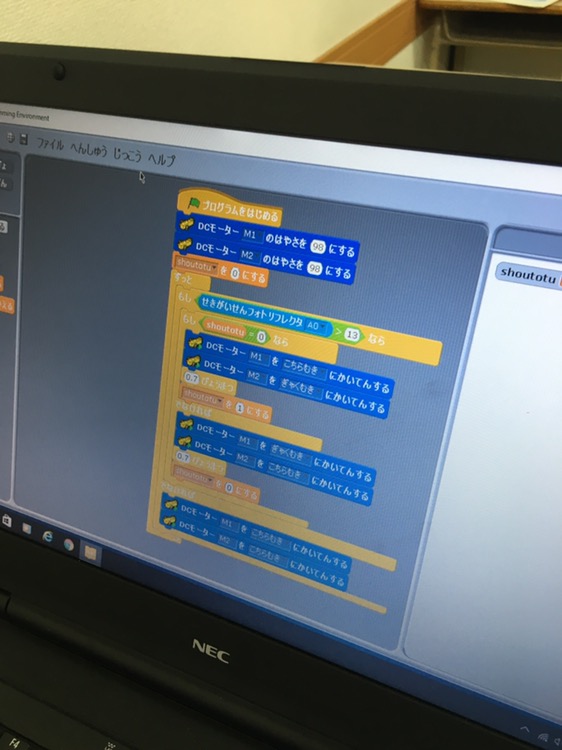
赤外線フォトリフレクターを使い、ブロックとの距離を測定してうまくよけていくプログラムです。
1回目のプログラミングです
二つ目の壁を置く場所が悪かったみたいで、左に曲がりませんでした。
壁の位置を修正して2回目です。
今度は2つ目の壁にも反応しましたが、曲がり切れていないですね。
生徒に何が原因なのか考えてもらい、プログラムを修正してもらいました。
それでは3回目です。
うまく曲がるようにはなりました。
しかし、壁にがんがんあたっていますね。
もう少しスムーズに曲がるようにならないか修正をお願いしました。
修正4回目です
1つ目の壁はうまくクリアしましたが、2つ目の壁を運んでいきました。
どうやら、壁の置く位置に少し問題があったみたいです。
壁の位置を少しずらして再度挑戦しました。
5回目の挑戦です。
どうしても2つ目の壁に少しあたってしまいます。
時間も迫ってきていたので、今回はこれで合格としました。
何度も試行錯誤する事がとても大切です
この、ロボットプログラミング教室の面白いところはパソコンの中だけで終わらないと言うことです。
前回も赤外線フォトリフレクターを使いましたが、前回と今回で表示される数字も若干違います。
また、使っているモーターも左右を独立して制御しているので、ブロックの組み立て方や走らせる場所によっても数値を変えてあげないといけません。
今回のプログラミングも壁を検知して右に曲がり、次の壁を検知して左に曲がるだけのプログラムですが、いろいろなことを考えて修正を繰り返していきました。
その時の生徒の悩んでいる顔、うまくいったときのうれしそうな顔がとても良いですね。
おまけプログラム、リモコンでの操作
最後にもう一つプログラミングを行いました。
エアコンのリモコンから出る赤外線を、赤外線フォトリフレクターに当てて反応させ、自動車が曲がっていくプログラムです。
逃げていく自動車を追いかけて、赤外線をどんどん当てるのはとても楽しそうでした。

コメント