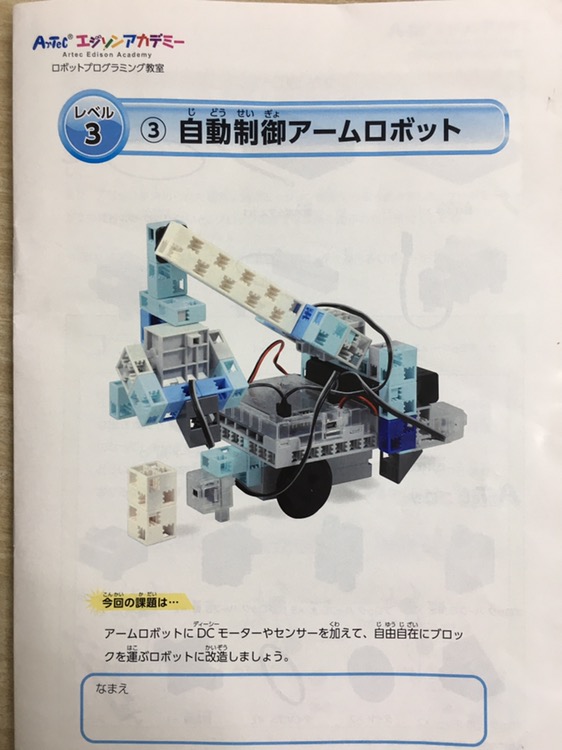
今回はいよいよレベル3の最後のプログラミング、自動制御アームロボットの作成です。
レベル2で学習した自動車の制御と、前回学習したアームロボットの組み合わせになります。
ロボットを
走らせる → 止める → つかむ → 走る → 止める → 置く
といったことをさせるのですが、これがとても難しいです。
30~40分たったときの様子を見てみましょう。
何度も位置を合わせてみますが、なかなかうまく掴んでくれません。
ただ、前に走ってブロックをつかむだけでも、細かな調整がたくさん必要になってきます。
そして、ちょっとずつ調整してうまく掴んだみたいですので、確認することになりました。
その時の動画がこちらです。
はい、またつかめませんでした。
最初に自動車をどの位置に置くかがとても重要になってきます。
前に走る距離やスピード、アームの角度や開く角度などが全て決まっているからです。
ちょっとしたトラブルもあったので
今回はここまでで時間切れになってしまいました。
というのも、電池ボックスの電池残量が少なくなっているのに気が付かなかったのです。
プログラムを転送して動かしてみると、モーターから音はするが全く動かない。
どこかプログラムがおかしいのかと思い、あれこれ変えてみるが状況は変わらず。
それで生徒と一緒にあれこれしているときに、電池が問題かもと気が付きました。
そうすると、あっさり動いてくれました。
まあ、こういったトラブルに対して試行錯誤するのもプログラミングを考える上では必要ですね。
次回は、この続きからすることにします。

コメント